
Um in den meisten Fertigungsprozessen der Kabelindustrie eine Rückführung der Produktlage zu erhalten werden so genannte Tänzer eingesetzt. Dabei handelt es sich im Prinzip um einen schwenkbaren Arm, dessen Winkellage als analoger Wert auf einen Regler geführt wird um z.B. die Zugkraft in einem Kabel während des Ab- und Aufwickelns vorzugeben.
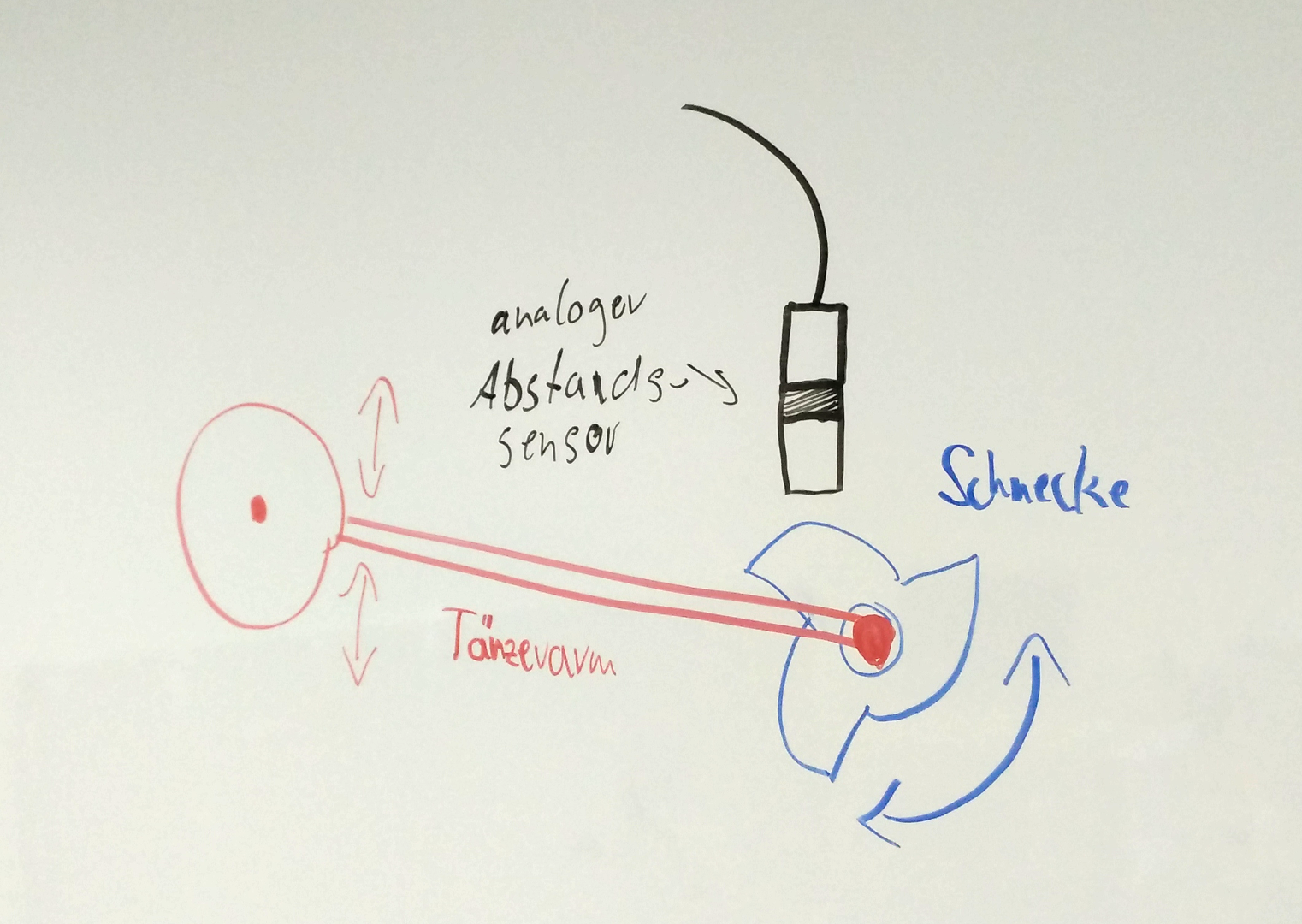

Üblicherweise wird der analoge Ausgangswert über einen induktiven Abstandssensor ermittelt, der den Abstand zu einer auf der Drehachse befindlichen Schnecke misst. Ändert sich die Winkellage des Tänzer, verringert bzw. vergrößert sich der Abstand und somit auch der Ausgabewert.
Ein großer Nachteil dieses Verfahrens ist das aufwendige Einstellen des Sensors. Zunächst einmal muss die Schnecke richtig herum positioniert werden, was vom jeweiligen Anwendungsfall (ab- oder aufwickelnder Prozess) abhängt.
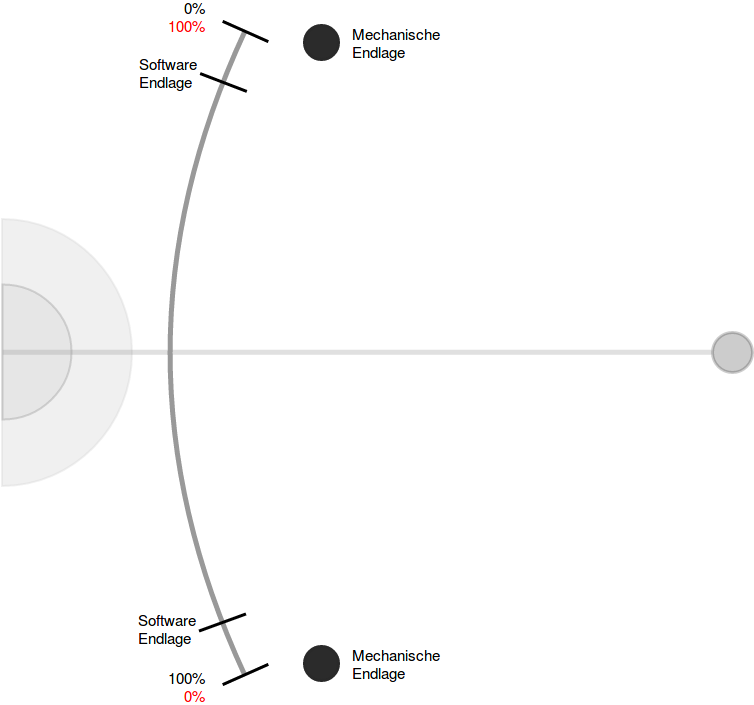
Dann muss die Steigung der Schnecke so beschaffen sein, dass kurz vor den jeweiligen Endlagen das Signal-Minimum und auf der anderen Seite das Signal-Maximum ausgegeben werden. Natürlich sollte der Mittelwert des Ausgangssignals auch mit der mechanischen Mitte des Tänzerarms übereinstimmen.
Wie sich erahnen lässt ist das korrekte Einstellen eines Tänzers nicht ganz so einfach und beinhaltet relativ viele Fehlerquellen. Es galt daher einen berührungslosen Sensor zu entwickeln, der den Einstellaufwand auf ein Minimum reduziert.
Anforderungen
- Einfaches Handling (sowohl Montage als auch Bedienung)
- Berührungslose und robuste Winkelerfassung
- Unabhängigkeit vom Einsatzzweck (sowohl für ab- als auch aufwickelnde Prozesse geeignet)
- Verschiedene analoge Ausgabeformate um möglichst universell einsetzbar zu sein (4..20mA, 0..20mA, 0..10V, 0..5V)
- Beleuchtetes LCD-Display mit Anzeige der Ist-Werte
Umsetzung
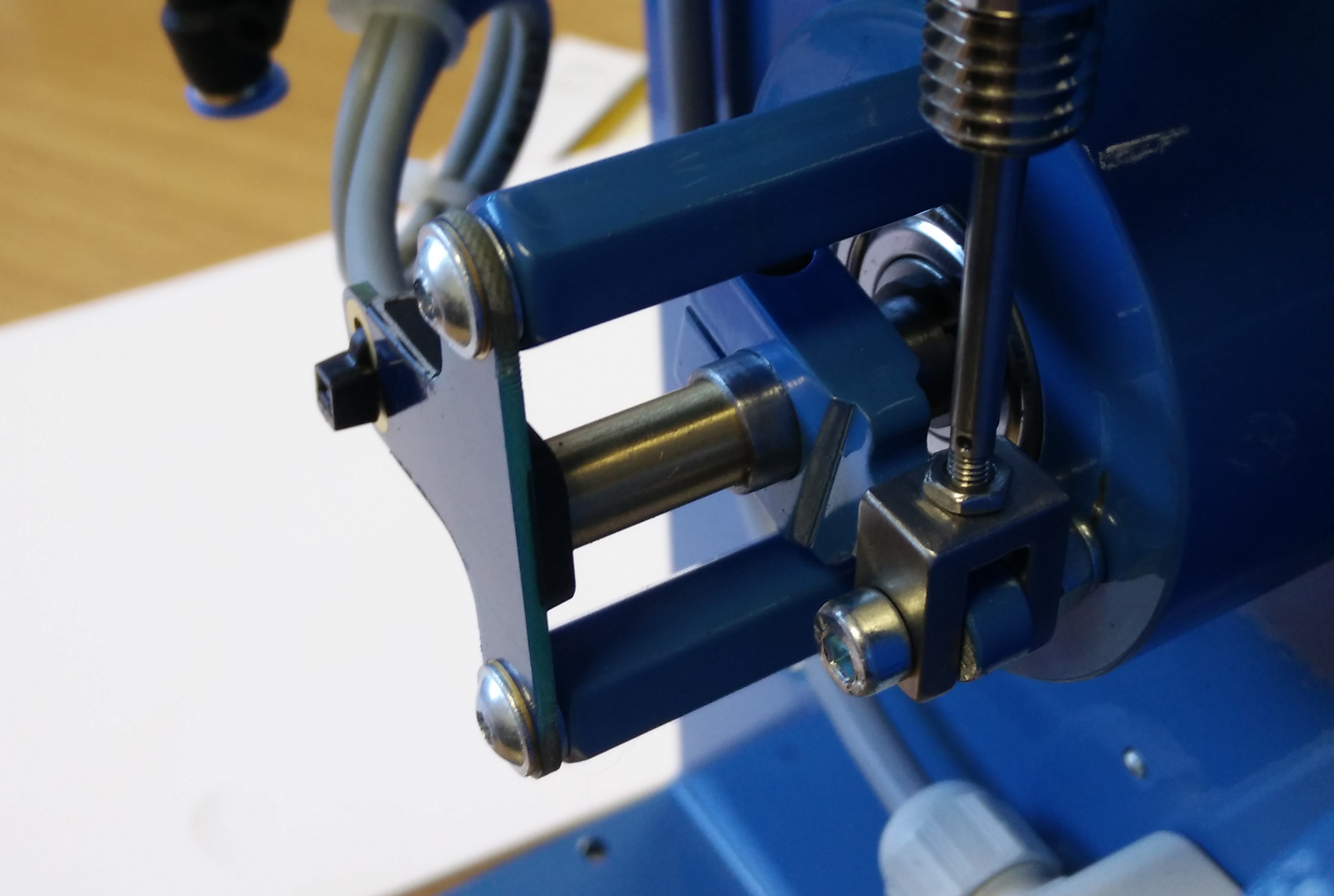
Um den Sensor möglichst einfach in schon vorhandene und bewährte Konstruktionen einbinden zu können, wurde ein magnetisches Messprinzip gewählt. Dies hat den Vorteil, dass sich der kleine Gebermagnet durch eine einfache Passung direkt in die Welle einsetzten lässt. Die jeweilige Ausrichtung des Magneten spielt dabei keine Rolle. Es ist nur wichtig, dass sich die Drehachse möglichst mittig und innerhalb des zulässigen Abstandes (1mm) über dem Sensor befindet.
Der Sensor selbst wurde ebenfalls möglichst klein aufgebaut und ist mit einem 40cm langen Kabel am Auswertemodul mit LCD-Display angeschlossen. Dieses wird per 5-poligen M12 Stecker an das übergeordnete System angebunden. Die Belegung lautet dabei wie folgt:
- 15V...35V DC (braun)
- Analogausgang (Wählbar: 4..20mA, 0..20mA, 0..10V, 0..5V) (weiß)
- Masse (blau)
- Unterschreitung des minimlalen Wertes (schwarz)
- Überschreitung des maximalen Wertes (grau)
Das System lässt sich sehr schnell einstellen, was im folgenden Video an unserem Vorführtänzer demonstriert wird:
Dazu werden zunächst die beiden Endlagen angefahren und eingeteacht. Danach wird bei einer Endlage (welche ist egal) ein Sicherheitsabstand ausgewählt. Zuletzt wird noch die Art der Analogausgabe ausgewählt und fertig. Die beiden Min- und Max-Signale sind als Öffner ausgeführt um eine Drahtbruchsicherheit zu gewährleisten.